Датчик касания для Arduino
Модуль представляет собой сенсорную кнопку, на его выходе формируется цифровой сигнал, напряжение которого соответствует уровням логических единицы и нуля. Относится к емкостным датчикам касания. С такого рода устройствами ввода данных мы сталкиваемся при работе с дисплеем планшета, айфона или тачскрин монитора. Если на мониторе мы нажимаем на иконку стилусом или пальцем, то здесь для этого используется область поверхности платы размером с иконку Windows касание которой производится только пальцем, стилус исключается. Основа модуля микросхема TTP223-BA6 . Есть индикатор питания.
Управление ритмом воспроизведения мелодии
При установке в прибор сенсорную область поверхности платы модуля закрывают тонким слоем стеклотекстолита, пластмассы, стекла иди дерева. К преимуществам емкостной сенсорной кнопки относится большой срок службы и возможность герметизации передней панели прибора, антивандальные свойства. Это позволяет использовать датчик касания в работающих на открытом воздухе приборах в условиях прямого попадания капель воды. Например, кнопка дверного звонка или бытовые приборы. Интересно применение в оборудовании умный дом - замена выключателей освещения.
Характеристики
Напряжение питания 2,5 - 5,5 В
Время отклика на касание в различных режимах потребления тока
низкое 220 мс
обычное 60 мс
Выходной сигнал
Напряжение
высокий лог. уровень 0,8 Х напряжение питания
низкий лог. уровень 0,3 Х напряжение питания
Ток при питании 3 В и логических уровнях, мА
низкий 8
высокий -4
Размеры платы 28 x 24 x 8 мм
Контакты и сигнал
Нет касания - выходной сигнал имеет низкий логический уровень, касание - на выходе датчика логическая единица.
Почему это работает или немного теории
Тело человека, как и все что нас окружает, обладает электрическими характеристиками. При срабатывании датчика прикосновения проявляются наши емкость, сопротивление, индуктивность. На нижней стороне платы модуля расположен участок фольги соединенный с входом микросхемы. Между пальцем оператора и фольгой на нижней стороне расположен слой диэлектрика - материал несущей основы печатной платы модуля. В момент касания происходит заряд тела человека микроскопическим током, протекающим через конденсатор, образованный участком фольги и пальцем человека. При упрощенном рассмотрении ток протекает через два последовательно соединенных конденсатора: фольга, палец находящихся на противоположных поверхностях платы и тело человека. Поэтому если поверхность платы закрыть тонким слоем изолятора, то это приведет к увеличению толщины слоя диэлектрика конденсатора фольга-палец и не нарушит работу модуля.
Микросхема TTP223-BA6 фиксирует ничтожный импульс микротока и регистрирует прикосновение. Благодаря свойствам микросхемы работать с такими токами никакого вреда такая технология не наносит. Когда мы касаемся корпуса работающего телевизора или монитора через нас проходят микротоки большей величины.
Режим пониженного потребления
После подачи питания датчик касания находится в режиме пониженного энергопотребления. После срабатывания на 12 секунд модуль переходит в обычный режим. Если далее касание не произошло, то модуль вернется в режим пониженного потребления тока. Скорость реакции модуля на касание в различных режимах приведена в характеристиках выше.
Работа совместно с Arduino UNO
Загрузите в Arduino UNO следующую программу.
#define ctsPin 2 // Контакт подключения линии сигнала датчика касания
int ledPin = 13; // Контакт для светодиода
Void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
pinMode(ctsPin, INPUT);
}
Void loop() {
int ctsValue = digitalRead(ctsPin);
if (ctsValue == HIGH){
digitalWrite(ledPin, HIGH);
Serial.println("TOUCHED");
}
else{
digitalWrite(ledPin,LOW);
Serial.println("not touched");
}
delay(500);
}
Соедините датчик касания и Arduino UNO как показано на рисунке. Схему можно дополнить включающимся при касании датчика светодиодом, подключенным через резистор 430 Ом к контакту 13. Сенсорные кнопки часто оснащают индикатором касания. Так удобней работать оператору. При нажатии на механическую кнопку мы чувствуем щелчок независимо от реакции системы. Здесь новизна технологии немного удивляет из-за нашей моторики сложившейся годами. Индикатор нажатия избавляет нас от излишнего ощущения новизны.

Как известно, — любая металлическая поверхность, например, металлический предмет, пластина или дверная ручка. У сенсоров отсутствуют механические элементы, что в свою очередь придает им значительную надежность.
Сфера использования подобных устройств достаточно широка это и включение звонка, выключатель света, управление электронными устройствами, группа датчиков сигнализаций и прочее. Когда это необходимо, использование сенсорного датчика позволяет обеспечить скрытое размещение включателя.
Описание работы сенсорного датчика прикосновения
Функционирование ниже приведенной схемы сенсора основывается на применении имеющегося в домах электромагнитного поля, которое создает размещенная в стенах электропроводка.
Прикосновение к датчику сенсора рукой равносильно подсоединению антенны к чувствительному входу усилителя. В результате этого наведенное сетевое электричество поступает на затвор полевого транзистора, который играет роль электронного переключателя.
Данный сенсорный датчик прикосновения достаточно прост вследствие применения полевого транзистора КП501А (Б, В). Данный транзистор обеспечивает пропускание тока до180 мА при предельном напряжении исток-сток до 240В для буквы А и 200В для букв Б и В. Для защиты от статического электричества на его входе имеется диод.
Полевой транзистор обладает большим входным сопротивлением, и для того чтобы управлять им хватает статического напряжения, которое больше порогового значения. Для данного типа полевого транзистора номинальное пороговое напряжение составляет 1…3 В, а максимально допустимое равно 20 В.
При прикосновении рукой к датчику Е1, степень наведенного потенциала на затворе является достаточной для открывания транзистора. При этом на стоке VT1 будут электрические импульсы продолжительностью 35 мс, и имеющие частоту электрической сети 50 Гц. Для переключения большинства электромагнитных реле необходимо всего 3…25 мс. Для предотвращения дребезга контактов реле, в момент прикосновения, в схему включен конденсатор C2. За счет накопленного заряда на конденсаторе, реле будет включенным даже в тот полупериод сетевого напряжения, когда VT1 будет закрыт. Пока есть прикосновение к датчику сенсора, реле будет во включенном состоянии.
Конденсатор C1 увеличивает помехоустойчивость сенсора к высокочастотным радиопомехам. Менять чувствительность прикосновения к сенсору можно путем изменения емкости C1 и сопротивления R1. Группа контактов К1.1 осуществляет управление внешними электронными устройствами.
Добавив к данной схеме триггер и узел коммутации сетевой нагрузкой можно получить .
Емкостной датчик прикосновений
Основным элементом, необходимым для реализации системы емкостных датчиков является конденсатор переменной емкости. Он должен иметь простую конструкцию и чувствительность к прикосновениям. Так как чувствительный элемент построен как «открытый» конденсатор, электрическое поле может взаимодействовать с внешним емкостным объектом, в нашем случае — пальцем. На рисунке 1 показан вид сверху и сбоку емкостного датчика, реализованного непосредственно на плате.

Рис. 1.
Как показано на рисунке 1, конденсатор образуется между проводящим слоем и заземлением. Взаимодействие проводящего слоя и окружающих его проводников создают базовую емкость, величина которой может быть измерена. Базовая емкость такого датчика составляет около 10 пФ. Когда проводник, т.е. палец, приближается к открытому конденсатору, в результате интерференции электрического поля, изменяется емкость конденсатора. Из-за емкости пальца, емкость датчика увеличивается даже без прикосновения. С помощью измерения емкости датчика и сравнивания каждого результата с базовой емкостью, микроконтроллер может определить не только факт нажатия кнопки, но и последовательность включений, что используется для реализации более сложных интерфейсов, таких как слайдеры.
Чувствительность датчика зависит от расстояния между проводящим и заземляющим слоем. Рекомендованное расстояние — 0,5 мм. Кроме этого, общая чувствительность системы зависит от толщины платы: при уменьшении толщины платы уменьшается чувствительность. Рекомендованная толщина платы 1…1,5 мм.
Емкость датчика без емкости пальца составляет около 5…10 пФ.
Заземляющий слой под датчиком экранирует его от других электронных компонентов системы. Он также способствует поддержанию постоянной базовой емкости, которая требуется как опорная при каждом измерении.
Конструкция датчика и интерфейса с пользователем
Полный интерфейс состоит из самого емкостного датчика (реализованного на плате), а также из диэлектрика между датчиком и пальцем при его прикосновении.
Реализация емкостного датчика на печатной плате
Зависимости емкостного датчика могут быть отображены на примере обычного плоского конденсатора. Рисунок 2 отображает его ключевые элементы.

Рис. 2.
Под термином «базовая емкость» понимается результат измерения емкости датчика, который не был подвержен никакому воздействию. Для простоты в качестве базовой емкости возьмем емкость конденсатора, образованного проводящим слоем в верхней части печатной платы и заземляющим — в нижней (нижняя и верхняя пластины на рисунке 2).
Расстояние d определяется самой печатной платой. Как сказано ранее, при уменьшении d, увеличивается базовая емкость и уменьшается чувствительность. Удельные емкости пространства (e 0) и материала (e r) определяют диэлектрическую постоянную платы.
Площадь датчика A обычно ограничена размерами пальца, рассчитывается как среднее между пальцем ребенка и взрослого. Нужно обратить внимание, что площадь датчика, которую не перекрывает палец, является бесполезной.
Таким образом, в процессе разработки нужно минимизировать базовую емкость датчика. Условием хорошей чувствительности и надежности системы является максимизация изменения емкости при приближении пальца к датчику. Конечно, эти две цели взаимоисключающие: при увеличении площади датчика до размеров пальца увеличивается базовая емкость, так как она пропорциональна А.

Рис. 3.
На рисунке 3 показано расположение кнопок и слайдера, используемое в качестве примера в этом документе.

Рис. 4. Построение слоев (красный — верхний сигнальный слой, синий — нижний заземляющий слой)
На рисунке 4 показаны четыре варианта размещения датчика на печатной плате, отличающиеся по построению заземляющего слоя.
Вверху слева отображен только верхний сигнальный слой: четыре прокладки датчика, окруженные верхним заземляющим слоем; нижний слой не используется. В верхней правой части рисунка показан такой же дизайн платы с заполнением заземляющего слоя 25%. Внизу слева — версия с 50% и справа — 100% заполнением.
Рекомендуется использовать несколько заземляющих слоев под каждым датчиком для изоляции элементов датчика от шума и других внешних изменений, способных вызвать изменение базовой емкости. Очевидно, что 100% заполнение, как показано в левом нижнем углу рисунка 4, обеспечивает максимальную шумовую изоляцию, а также увеличивает базовую емкость. Для получения оптимального соотношения шумовой изоляции и базовой емкости, принято использовать заполнение от 50% до 75%.
Изоляционный слой датчика
В этом типе приложения изоляционный слой датчика выполняется из пластика. Благодаря этому слою, пальцы не контактируют непосредственно с датчиком. Модель, представленная на рисунке 2, может быть использована для визуализации интерфейса взаимодействия пальца и конденсатора. При этом нижняя обкладка выступает в роли датчика, а верхняя — палец пользователя. Становится ясным, что при увеличении площади взаимодействия до размеров пальца, увеличивается А, максимизируется изменение емкости. При увеличении слоя изоляции d, изменение емкости уменьшается обратнопропорционально. Ключевой момент, который нельзя игнорировать, это материал из которого выполняется изоляция. Диэлектрическая постоянная изоляционного материала, а так же его толщина очень сильно влияют на чувствительность и простоту использования емкостного датчика прикосновений. В таблице 1 представлены диэлектрические постоянные некоторых материалов.
Таблица 1. Диэлектрические постоянные материалов
Кроме самого изолятора, важным моментом является соединение датчика и изолятора. Если соединение не плотное и имеются промежутки, емкость датчика изменится. Поэтому часто используются клейкие изоляторы.
Использование MSP430 для измерения емкости датчика прикосновений
Теперь рассмотрим два метода измерения емкости датчика прикосновений.
Метод измерения на основе осциллятора
Первый метод основан на использовании осциллятора. Реализовать этот метод можно на базе MSP430, с использованием его компаратора и емкостного датчика в качестве элемента настройки. Любые изменения емкости датчика приведут к изменению частоты, которая может быть измерена с помощью таймера Timer_A микроконтроллера MSP430. На рисунке 5 показан пример такой системы.

Рис. 5.
Резисторы R создают опору для компаратора, когда на Px.y установлен высокий уровень. Этот сигнал противоположен по полярности сигналу зарядки или разрядки емкости датчика (C sensor), что приводит к длительным осцилляциям. При равных значениях сопротивления R граничные значения составляют 1/3 V cc и 2/3 V cc , частота осцилляций вычисляется по формуле:
f OSC = 1/
Подсчитав число периодов осцилляций в течение заданного промежутка времени, можно вычислить частоту и измерить емкость. В рассматриваемом приложении сопротивление резистора R C составляет 100 кОм. В результате частота осцилляций равна приблизительно 600 кГц при емкости датчика 10 пФ.
В качестве источника тактового сигнала используется интегрированный 12 килогерцовый VLO. Этот сигнал подается на сторожевой таймер WDT. С каждым прерыванием сторожевого таймера ядро анализирует состояние регистра таймера Timer_A, TAR. Вычисляется разница двух последних значений регистра. В реальности абсолютное значение емкости не нужно, интересно только ее изменение.
Возможно построение системы с несколькими емкостными датчиками. Для этого требуется построение мультиплексора на компараторе Comparator_A+ (рисунок 6).

Рис. 6.
Для реализации системы требуется по одному резистору на каждый датчик и три резистора для компаратора.
Метод измерения емкости на основе резистора
Второй метод измерения емкости датчика прикосновений основан на использовании внешнего резистора для зарядки или разрядки емкостного датчика. Для зарядки или разрядки используется один из портов MSP430, время заряда или разряда измеряется с помощью встроенного таймера Timer_A. На рисунке 7 изображен пример системы с использованием микроконтроллера MSP430 для измерения времени разряда конденсатора.

Рис. 7.
При значении емкости C sensor = 10 пФ и R = 5,1 М время разрядки составляет около 250 мкс. Px.y конфигурируется как выход с высоким уровнем для зарядки конденсатора. Он может быть переконфигурирован как вход, для разряда C sensor через R. Максимальный ток через порт MSP430 составляет ±50 нА.
Если порт Px.y поддерживает работу с прерываниями (у MSP430 это порты P1.x и P2.x), внутренний сигнал низкого уровня может использоваться как порог, при достижении которого они генерируются. При получении этого прерывания, ядро анализирует содержимое регистра таймера Timer_A. Таймер может использовать в качестве источника тактового сигнала внутренний DCO. Частота генерируемого сигнала при этом составляет 8 или 16 МГц (в зависимости от семейства MSP430).

Рис. 8.
На рисунке 8 показан один измерительный цикл. Таймер начинает отсчет с нуля и в момент, когда напряжение на датчике достигает порога V IT , значение таймера считывается. Также таймер может работать в режиме постоянного счета, при этом нужно производить считывание его значений в момент начала и конца разряда конденсатора и вычислять их разницу. При увеличении емкости датчика возрастает время разряда конденсатора и увеличивается число циклов таймера за время измерения.
Выше говорилось, что для каждого порта нужен один резистор. Схему можно упростить, если использовать один резистор для двух портов. Во время измерения емкости одного из датчиков порт, подключенный ко второму должен иметь низкий уровень сигнала, т.е. служит заземлением для разрядки емкости. Другое достоинство такой схемы в том, что емкость каждого датчика может быть измерена в двух направлениях: зарядка от нуля до высокого уровня и разрядка от V cc до порога низкого уровня. На рисунке 9 показан этот метод.

Рис. 9.
Подсчет тактов нужно производить два раза: во время заряда и разряда. При этом шум 50/60 МГц оказывает меньше влияния на результат измерения.
Программное обеспечение
После того как результат измерения получен, его нужно программно интерпретировать. Шум источника питания, сдвиг частоты синхронизации, внешние 50/60 МГц шумы могут привести к неправильному принятию решения.
Иногда для эффективности можно отбросить несколько младших битов результата. Это приемлемо, если нужно отслеживать только факт нажатия кнопки. Но если требуется более высокое разрешение, этого себе позволить уже нельзя. Низкочастотная фильтрация и простое усреднение нескольких полученных результатов может помочь сгладить шумы. Но для достижения низкого энергопотребления наличие младших битов результата измерения более критично.
Отслеживание базовой емкости датчика
Без возможности динамически отслеживать изменения емкости датчика, всякого рода нестабильности могут привести к ложному обнаружению нажатия кнопки или ее «залипания». Рассмотрим вариант с простой кнопкой, которая имеет два состояния: включена/выключена. В случае если результат смещается, он может приблизиться к порогу, при достижении которого кнопка считается нажатой, то есть произойдет ложное срабатывание.
Один из методов отслеживания и подстройки базовой емкости показан на рисунке 10.
Нужно обратить внимание на то, что эти действия выполняются для каждого датчика отдельно. Вычисление переменной "Delta" и подстройка "base" производится по-разному в RO- и RC-алгоритмах. В RO измеренное значение уменьшается, когда емкость конденсатора увеличивается; а в RC измеренное значение увеличивается.
После завершения измерения, в первую очередь, нужно определить, произошло ли прикосновение. Это может быть произведено путем сравнения полученного значения с порогом, соответствующим самому легкому прикосновению, которое может быть распознано. Если определено, что прикосновения не было, базовое значение подстраивается. Каким образом происходит подстройка, зависит от того, в какую сторону произошло изменение.
При увеличении результата измерения емкости рекомендуется подстраивать базовое значение более медленно. Увеличение результата может означать не только сдвиг в результате ошибок, но и в результате движения пальца в направлении датчика. И если базовое значение подстраивается быстро, реальное прикосновение пальца может быть не замечено. Для этого рекомендуется подстраивать базовое значение только на единицу каждый цикл измерения (рисунок 10).

Рис. 10.
Реализация функции обычной кнопки
Построение кнопок является самым распространенным вариантом использования емкостных датчиков. На рисунке 11 дан пример построения системы с четырьмя кнопками.

Рис. 11.
Порог, при котором принимается решение, что кнопка нажата, должен быть выше шумов.
Реализация функции слайдера
Более сложная функция, организуемая на емкостных датчиках, слайдер. При этом нужно отслеживать превышение уже нескольких порогов.
Самый простой вариант построения слайдера можно организовать, если для каждого датчика определить несколько позиций. В примере, приведенном ниже (рисунок 12), рассматривается система, в которой для каждого датчика определено 16 позиций. В результате получается 64-позиционная система.

Рис. 12.
В качестве DELTAMAX выбирается максимальное значение емкости, которое может быть достигнуто. Затем производится деление диапазона от 0 до DELTAMAX на определенное число шагов Steps. Ноль соответствует случаю, когда кнопка не нажата. По максимальному значению определяется положение пальца. Более линейная передаточная характеристика системы достигается с помощью интерполяции значений всех датчиков.
Мультиплексирование датчиков для построения слайдера
При построении слайдера расширить число датчиков при ограниченном числе портов ввода/вывода можно посредствам мультиплексирования. При этом к одному выводу подключается несколько датчиков. Дополнительный датчик приводит только к увеличению базовой емкости. Однако, при увеличении базовой емкости, в момент воздействия только на один из датчиков, отклик датчика меньше. Поэтому, обычно вместе не соединяют более двух датчиков.
Для того, чтобы определить, какой из мультиплексированных датчиков подвергается воздействию, их нужно разнести в пространстве. Пример расположения датчиков в такой системе показан на рисунке 13.

Рис. 13.
Заключение
В статье рассмотрены два метода реализации емкостных датчиков прикосновения с использованием MSP430. Каждый из методов имеет свои достоинства и недостатки. Рассмотрим основные из них.
- Метод на основе осциллятора:
— Требуется микроконтроллер с компаратором Comp_A+;
— Число независимых датчиков ограничено количеством входов Comp_A+;
— Требуется один внешний резистор R на каждый датчик, а также цепь из трех R;
— Чувствительность ограничена потреблением мощности (программируемое время измерения);
- Метод на основе резистора:
— Может быть реализован на любом микроконтроллере MSP430;
— До 16 независимых датчиков (16 портов ввода/вывода, работающих с прерываниями);
— Один внешний резистор R на каждые два датчика;
— Чувствительность ограничена максимальной частотой микроконтроллера (фиксированное время измерения);
— Минимальное потребление энергии;
Приложение может быть расширено и оптимизировано пользователем для реализации конечного устройства.
Полное описание различных примеров применений MSP430, исходные тексты программ, дополнительную информацию можно найти на сайте www.сайт в разделе, посвященном микроконтроллерам.
Получение технической информации, заказ образцов, поставка —
e-mail:
Новое семейство тактовых генераторов
Компания Texas Instruments представила семейство программируемых тактовых генераторов, имеющих от 1 до 4 схем ФАПЧ. ИС позволяют генерировать до 9 тактовых сигналов, синтезируемых из одной входной частоты. Каждый выход поддерживает внутрисистемное программирование частоты до 230 МГц. Перечисленные особенности предоставляют ряд преимуществ. В их числе — пониженное потребление, более быстрый процесс проектирования и простота изменения тактовых частот без необходимости повторного проектирования системы. Эти преимущества позволят существенно снизить стоимость потребительских приложений, в т.ч. IP ТВ-приставок, IP-телефонов, цифровых медиасистем (цифровые телевизоры, устройства с потоковыми медиаданными, принтеры, навигационные системы и портативные устройства).
Новые тактовые генераторы оптимизированы на работу совместно с процессорами DaVinci TM (TI) для генерации тактовых сигналов цифровых процессоров, аудио АЦП или кодеков, а также контроллеров Ethernet или USB. Встроенный кварцевый генератор, управляемый напряжением (VCXO) позволяет выполнить частотную синхронизацию различных потоков данных.
| Состав нового семейства тактовых генераторов |
||
|---|---|---|
| Наименование | ФАПЧ | Выход, В |
| CDCE949 | 4 | 2,5/3,3 |
| CDCE937 | 3 | 2,5/3,3 |
| CDCE925 | 2 | 2,5/3,3 |
| CDCE913 | 1 | 2,5/3,3 |
| CDCEL949 | 4 | 1,8 |
| CDCEL937 | 3 | 1,8 |
| CDCEL925 | 2 | 1,8 |
| CDCEL913 | 1 | 1,8 |
О компании Texas Instruments
В данной статье мы подробно (но не слишком) рассмотрим принципы электричества, которые позволяют нам обнаруживать прикосновение человеческого пальца, используя немного больше, чем просто конденсатор.
Конденсаторы могут быть сенсорными
В течение последнего десятилетия или около того стало действительно трудно представить себе мир с электроникой без сенсорных датчиков прикосновений. Смартфоны являются тому наиболее заметным и распространенным примером, но, конечно, существуют и другие многочисленные устройства и системы, которые обладают датчиками прикосновений. Для построения сенсорных датчиков прикосновений могут использоваться и емкость, и сопротивление; в данной статье мы будем обсуждать только емкостные датчики, которые более предпочтительны в реализации.
Хотя применения, основанные на емкостных датчиках, могут быть довольно сложными, фундаментальные принципы, лежащие в основе данной технологии, достаточно просты. На самом деле, если вы понимаете суть емкости и факторы, которые определяют емкость конкретного конденсатора, вы стоите на правильном пути в понимании работы емкостных сенсорных датчиков прикосновения.
Емкостные сенсорные датчики касания делятся на две основные категории: на основе взаимной емкости и на основе собственной емкости. Первый из них, в котором конденсатор датчика состоит из двух выводов, которые действуют как излучающий и приемный электроды, является более предпочтительным для сенсорных дисплеев. Последний, в котором один вывод конденсатора датчика подключен к земле, является прямым подходом, который подходит для сенсорной кнопки, слайдера или колеса. В данной статье мы рассмотрим датчики на основе собственной емкости.
Конденсатор на базе печатной платы
Конденсаторы могут быть различных типов. Мы все привыкли видеть емкость в виде компонентов с выводами или корпусов поверхностного монтажа, но на самом деле, всё, что вам действительно необходимо, это два проводника, разделенных изолирующим материалом (т.е. диэлектриком). Таким образом, довольно просто создать конденсатор, используя лишь электропроводные слои, разделенные печатной платой. Например, рассмотрим следующие вид сверху и вид сбоку печатного конденсатора, используемого в качестве сенсорной кнопки прикосновения (обратите внимание на переход на другой слой печатной платы на рисунке вида сбоку).
Изолирующее разделение между сенсорной кнопкой и окружающей медью создает конденсатор. В этом случае, окружающая медь подключена к земле, и, следовательно, наша сенсорная кнопка может быть смоделирована, как конденсатор между сенсорной сигнальной площадкой и землей.
Возможно, сейчас вы захотите узнать, какую емкость реально обеспечивает такая разводка печатной платы. Кроме того, как мы рассчитаем ее точно? Ответ на первый вопрос: емкость очень мала, может составлять около 10 пФ. Что касается второго вопроса: не беспокойтесь, если забыли электростатику, потому что точное значение емкости конденсатора не имеет никакого значения . Мы ищем только изменения в емкости, и мы можем обнаружить эти изменения без знания номинального значения емкости печатного конденсатора.
Влияние пальца
Так что же вызывает эти изменения емкости, которые контроллер датчика прикосновений собирается обнаружить? Ну, конечно же, человеческий палец.
Прежде, чем мы обсудим, почему палец изменяет емкость, важно понимать, что здесь нет прямого электрического контакта; палец изолирован от конденсатора лаком на печатной плате и, как правило, слоем пластика, который отделяет электронику устройства от внешней среды. Так что палец не разряжает конденсатор , и, кроме того, количество заряда, хранимое в конденсаторе в определенный момент, не представляет интереса - скорее интерес представляет емкость в определенный момент.
Итак, почему же присутствие пальца изменяет емкость? Есть две причины: первая включает в себя диэлектрические свойства пальца, а вторая включает в себя его проводящие свойства.
Палец как диэлектрик
Обычно мы думаем о конденсаторе, как имеющем фиксированную величину, определяемую площадью двух проводящих пластин, расстоянием между ними и диэлектрической проницаемостью материала между пластинами. Мы, конечно, не можем изменить физические размеры конденсатора, просто прикоснувшись к нему, но мы можем изменить диэлектрическую проницаемость, так как палец человека обладает диэлектрическими характеристиками, отличающимися от материала (предположительно воздуха), который он вытесняет. Это правда, что палец не будет находиться в настоящей области диэлектрика, т.е. в изолирующем пространстве непосредственно между проводниками, но такое «вторжение» в конденсатор необязательно:
Как показано на рисунке, чтобы изменить диэлектрические характеристики, нет необходимости помещать палец между пластинами, поскольку электрическое поле конденсатора распространяется в окружающую среду.
Оказывается, что человеческая плоть является довольно хорошим диэлектриком, потому что наши тела состоят в основном из воды. Относительная диэлектрическая проницаемость вакуума равна 1, а относительная диэлектрическая проницаемость воздуха лишь немного выше (около 1,0006 на уровне моря при комнатной температуре). Относительная диэлектрическая проницаемость воды намного выше, около 80. Таким образом, взаимодействие пальца с электрическим полем конденсатора представляет собой увеличение относительной диэлектрической проницаемости, и, следовательно, приводит к увеличению емкости.
Палец как проводник
Любой, кто испытал на себе удар электрического тока, знает, что кожа человека проводит ток. Я уже упоминал выше, что прямого контакта между пальцем и сенсорной кнопкой (то есть ситуации, когда палец разряжает печатный конденсатор) нет. Тем не менее, это не означает, что проводимость пальца не имеет значения. Она на самом деле весьма важна, так как палец становится второй проводящей пластиной в дополнительном конденсаторе:
На практике мы можем предположить, что этот новый конденсатор, созданный пальцем, подключен параллельно существующему печатному конденсатору. Эта ситуация немного сложнее, потому что человек, использующий сенсорное устройство, электрически не соединен с землей на печатной плате, и, таким образом, эти два конденсатора не включены параллельно в обычном для анализа цепей смысле.
Тем не менее, мы можем думать о человеческом теле, как об обеспечивающем виртуальную землю, поскольку оно имеет относительно большую емкость, чтобы поглощать электрический заряд. В любом случае, нам не нужно беспокоиться о точной электрической связи между конденсатором с пальцем и печатным конденсатором; важным моментом является то, что псевдопараллельное соединение этих двух конденсаторов означает, что палец будет увеличивать общую емкость, так как конденсатор добавляется параллельно.
Таким образом, мы можем увидеть, что оба механизма влияния при взаимодействии пальца и емкостного датчика касания способствуют увеличению емкости.
Близкое расстояние или контакт
Предыдущее обсуждение приводит нас к интересной особенности емкостных датчиков касаний: измеряемое изменение емкости может быть вызвано не только контактом между пальцем и датчиком, но и близким расстоянием между ними. Я обычно думаю о сенсорном устройстве, как о замене механического переключателя или кнопки, но емкостная технология датчиков касаний на самом деле представляет собой новый уровень функциональности, позволяя системе определять расстояние между датчиком и пальцем.
Оба механизма изменения емкости, описанные выше, оказывают влияние, которое зависит от расстояния. Для механизма на базе диэлектрической проницаемости количество «мясного» диэлектрика взаимодействие с электрическим полем конденсатора увеличивается при приближении пальца к проводящим частям печатного конденсатора. Для механизма на базе проводящих свойств емкость конденсатора с пальцем (как и любого другого конденсатора) обратно пропорциональна расстоянию между проводящими пластинами.
Имейте в виду, что этот метода не подходит для измерения абсолютного расстояния между датчиком и пальцем; емкостные датчики не предоставляют тех данных, которые необходимы для выполнения точных вычислений абсолютных расстояний. Я полагаю, что можно было бы откалибровать емкостную сенсорную систему для грубых измерений расстояний, но так как схема емкостных датчиков была разработана для обнаружения изменения емкостей, то отсюда следует, что эта технология особенно подходит для обнаружения изменения в расстояниях, т.е. когда палец приближается или удаляется от датчика.
Заключение
Теперь вы должны точно понимать фундаментальные основы, на базе которых строятся емкостные сенсорные системы. В следующей статье мы рассмотрим методы реализации этих основ, которые помогут вам перейти от теории к практике.
Надеюсь, статья оказалась полезной. Оставляйте комментарии!
Электор 2008 №7-8
Работа ёмкостных датчиков прикосновения основана на электрической ёмкости человеческого тела. Например, когда близко к датчику подносят палец, то это создаёт ёмкость между датчиком и землёй, лежащую в диапазоне 30...100 пФ. Этот эффект может быть использован в датчиках приближения и переключателях, управляемых прикосновением.
Сенсорные ёмкостные датчики имеют очевидные преимущества по сравнению с другими датчиками (например, срабатывающими от наводок частотой 50/60 Гц или измеряющими сопротивление), но они более трудоёмки в реализации. Производители микросхем, такие как Microchip в прошлом создали специальные ИС для этих целей. Однако и сейчас можно создать надёжный ёмкостный детектор и/или переключатель, используя только небольшое число стандартных компонентов.
В этой схеме мы детектируем изменения ширины импульсов сигнала, возникающие при касании контакта. На рисунке 1 можно рассмотреть следующие узлы (слева направо):
Рис. 1. IC1 - 561ТЛ1
Генератор прямоугольных импульсов, выполненный на триггере Шмитта (ИС CD4093);
RC цепь с гасящим диодом, за которыми идёт триггер Шмитта/контактная пластина с изолирующим конденсатором ёмкостью 470 пФ;
- Интегрирующая RC цепь, преобразующая изменения ширины импульсов в напряжение. Это напряжение лежит в районе 2,9...3,2 вольт, когда до пластины дотрагиваются, и 2,6 вольт в другом случае.
- Компаратор LM 339 используется для сравнения напряжения в точке C с образцовым напряжением в точке D. Последнее составляет около 2,8 В и устанавливается делителем напряжения.
Как только произойдёт касание сенсорной пластины, выход схемы станет активным. Для пояснения работы схемы на рисунке 2 приведены осциллограммы сигналов в разных точках. Пунктирная линия показывает состояние при касании пластины датчика, сплошная линия - при отсутствии касания.
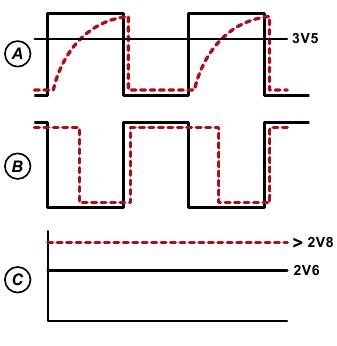
Рис. 2. Осциллограммы сигналов а разных точках.
Образцовое напряжение в точке D настраивается один раз с помощью делителя R4/R5 (изменяя значение R4). Величина этого напряжения сильно зависит от площади поверхности пластины-датчика (обычно несколько квадратных сантиметров). Большая площадь поверхности пластины увеличивает ёмкость и напряжение в точке C тем не менее будет больше, по сравнению с тем напряжением, когда пластины не касались. Образцовое напряжение в точке D должно быть установлено ближе к значению 3,4 В. Датчик прикосновения может так же работать с пластинами большой площади (например, можно использовать в качестве сенсора весь корпус).
Выходной сигнал может быть использован для включения различных нагрузок. Во многих случаях рекомендуется добавить на выход один триггер Шмитта, особенно если выход соединён с цифровым входом.
Вим Абуйс
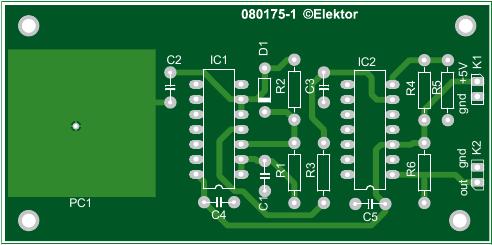
Рис. 4. Расположение компонентов на печатной плате.


Рис. 5. Печатная плата.
Рис. 6. Печатная плата (зеркальный вид).




